La recherche océanographique, et notamment, l'observation des océans, est rentrée dans une nouvelle ère grâce à l'apparition de nouvelles technologies et en particulier des engins autonomes d'observation, ces "robots" dédiés à l'observation sous-marine.
Le glider (planeur sous-marin) autonome SEA002 développé par le Laboratoire d'Océanographie de Villefranche (LOV/IMEV) et la société Alseamar fait partie de ces (r)évolutions majeures.
Récemment, le SEA002 a été équipé du capteur "Underwater Vision Profiler" (UVP6) de nouvelle génération également développé par le LOV.
Ce capteur est une version miniaturisée de la version 5 commercialisé sous licence dans le monde entier par la société Hydroptic, et qui a réalisé des profils, parfois jusqu'à 6000m de profondeur dans tous les océans.
Il a pu voir le jour avec l'aide de financements européens (Bridges, H2020) et de la Banque Publique d'Investissement et le soutien du Pôle Mer Méditerranée. Et il est destiné à équiper tous types de robots sous marins (http://www.hydroptic.com/index.php/public/Page/product_item/UVP6-LP) tels que gliders ou flotteurs profileurs.
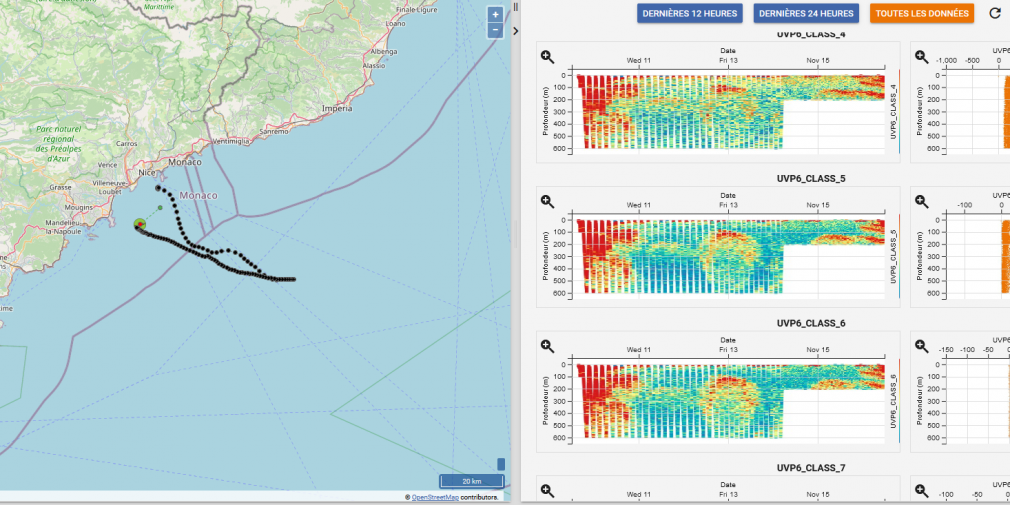
Le LOV a déployé SEA002 équipé de l'UVP6 au Sud de Villefranche. Le robot a voyagé vers la station instrumentée DYFAMED à 50 km en direction de la Corse, en réalisant des plongées à 600m.
Le retour s'est effectué avec des plongées à 200m pour obtenir une meilleure résolution spatiale. Le robot a pu transmettre les données de l'UVP6 à chaque remontée en surfacepour la première fois !
Ces données préliminaires montrent déjà des résultats intéressants.